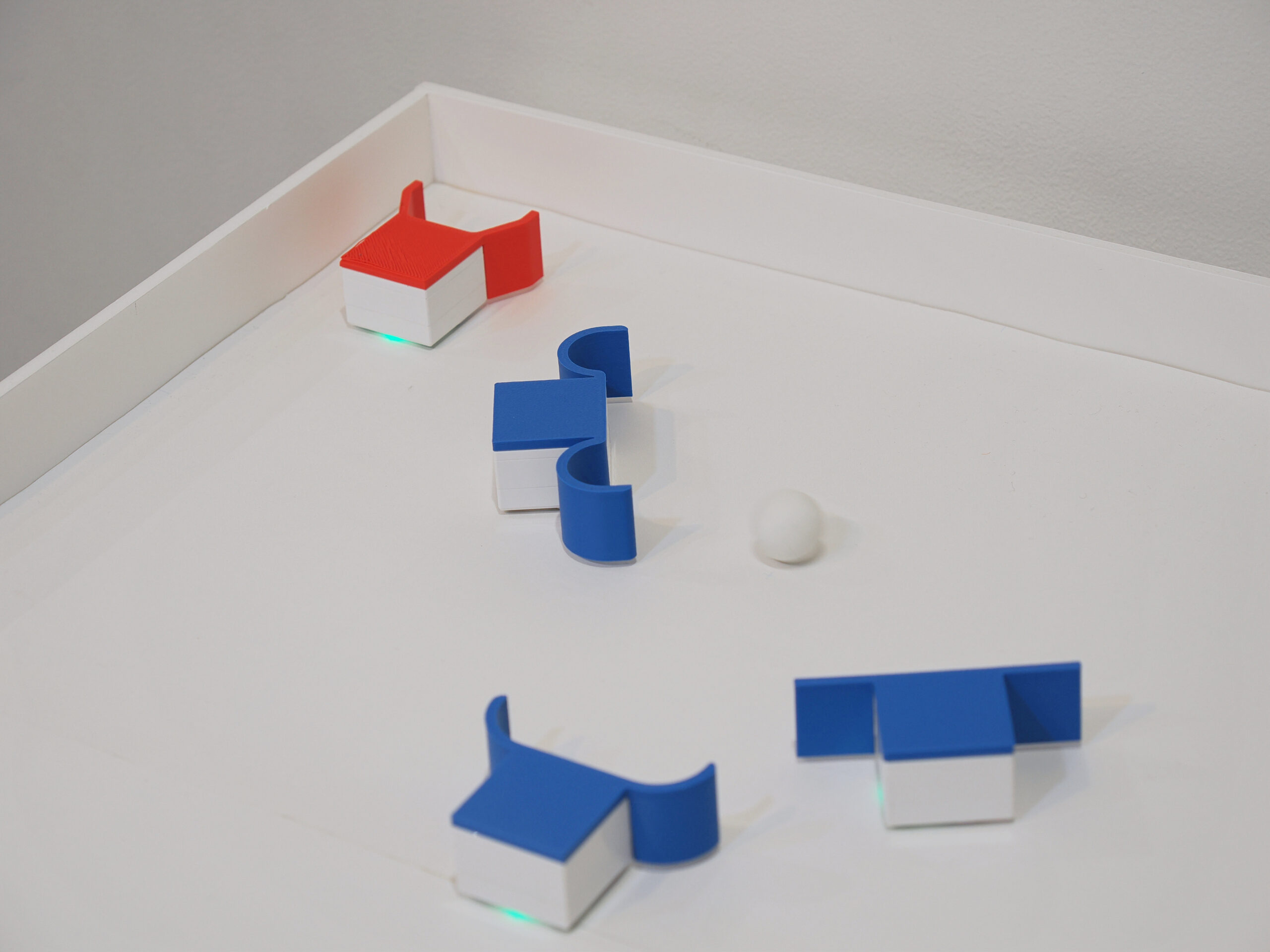
卒業研究にて作成した、〈からくり〉としての群ロボットシステムです。アタッチメント形状に合わせた役割を有する複数のロボットが、斜面フィールド上で協働しながら、ボールをゴールまで運ぶタスクを繰り返し実行します。鑑賞者は動いているロボットを掴み、フィールド上のロボットの配置や構成に介入することができ、群ロボットはその介入に合わせてタスクの実行方法を変化させます。
〈からくり〉の概念を物理的な制約から解放し、鑑賞者とより密接に関わることのできるメカニズムとして再構成することで、従来の〈からくり〉にはない新たな価値を示唆しました。
インタラクション2026 Abstract
「からくり」は,動きの面白さやその因果関係を想像する楽しみを提供してきたが,その構造は装置内部に固定されていた.本稿では,この「からくり」を装置の物理的制約から解放し,広い意味でのメカニズムとして拡張したMechAnima を提案,実装した.本システムは斜面フィールド上の群ロボットで構成され,各個体が最新の状況に応じて変化する関係性を介して協働し,ボールをゴールへ運搬するタスクを繰り返し実行する.鑑賞者はロボットの配置や構成を自由に変更でき,群ロボットはこの介入を環境変化として受け入れ,タスクの実行方法を動的に再構成する.