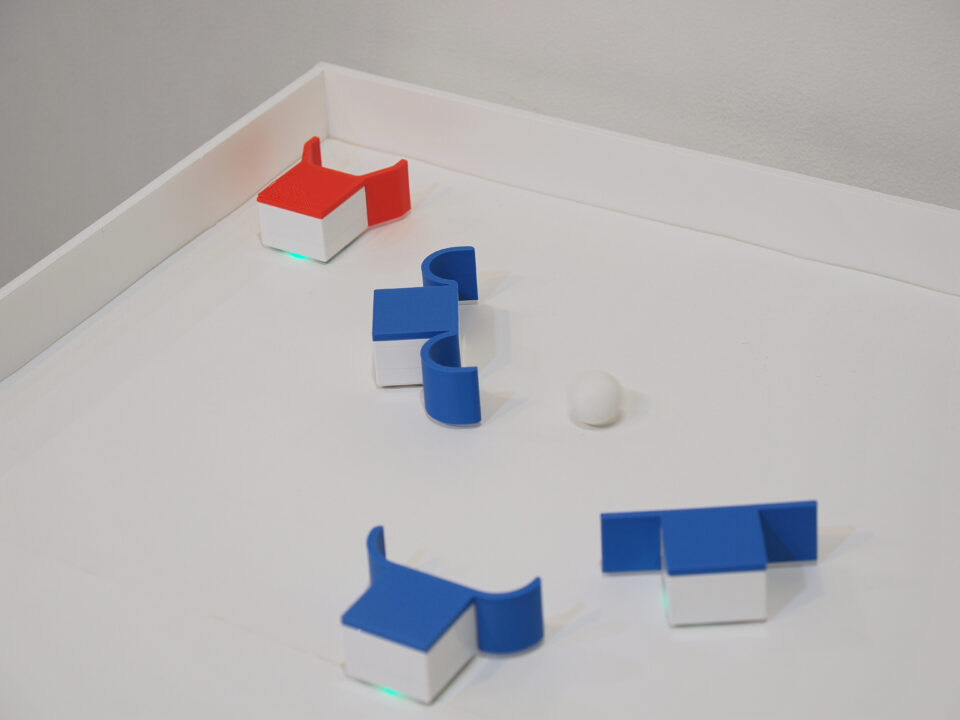
卒業研究のプロトタイプとして制作した、群ロボットからなるからくり探究ツールキットです。アタッチメントとして加速や減速などの特有の動力の伝達特性を有するからくりのユニットを装着した小型のロボットが、フィールド上をその特性に合わせた動きで走り回ります。ユーザーは、その動きを手がかりにからくりの動力伝達特性を予想し、フィールド外部に配置されている動力ユニットにロボットを連結させることで、専門的な知識を持たずともロボットを自由に組み替えながらからくりを探求する楽しみを得ることができます。
HIS2025 Abstract
からくり装置が持つ複雑な動力伝達特性は、からくりの魅力であるとともに、直感的な理解が困難なものである。本研究では、モジュール型のからくりツールキットを群ロボットとしてデザインした。各ロボットは固有の特性を持つからくりのモジュールであり、伝達特性を物理的な動きで自ら表現する。ユーザーはこれらの動きを手掛かりにロボットを並び替え、システム全体の動力伝達の変化を探求できる。